云小蜜对话机器人核心技术 从自然语言处理、知识图谱到多模态数据采集与地理数据处理
随着人工智能技术的飞速发展,对话机器人已成为智能客服、虚拟助手等领域的核心应用。以阿里巴巴的云小蜜为代表的智能对话机器人,其背后是一套复杂而精密的技术体系,涵盖了自然语言处理(NLP)、知识图谱、多模态数据(语音、图像)采集与处理,以及地理信息数据采集与处理等多个关键模块。这些技术协同工作,共同赋予机器人理解、推理和交互的能力。本文旨在解析这些核心算法与技术,特别是聚焦于其数据采集与处理的关键环节。
一、 自然语言处理(NLP):对话理解的基石
自然语言处理是对话机器人的“大脑”和“耳朵”。云小蜜通过先进的NLP算法,实现用户意图的精准识别与语义理解。
- 意图识别与槽位填充:采用基于深度学习的分类模型(如BERT、ERNIE等预训练模型),将用户query分类到预设的意图类别(如“查询物流”、“退换货”)。通过序列标注模型(如BiLSTM-CRF)进行实体识别和槽位填充,提取关键信息(如订单号、商品名称)。
- 语义理解与上下文管理:利用注意力机制和Transformer架构,模型不仅能理解当前语句,还能结合对话历史进行上下文关联,处理指代消解和省略补充,保证对话的连贯性。
- 情感分析:通过情感分析模型判断用户情绪,使机器人能采取更人性化的回应策略,提升用户体验。
二、 知识图谱:结构化知识的引擎
知识图谱为机器人提供了结构化的领域知识库,是其进行精准问答和复杂推理的“知识库”。
- 构建与存储:云小蜜的知识图谱通常从电商商品库、客服日志、领域文档中通过信息抽取(实体识别、关系抽取)技术自动或半自动构建,并以图数据库(如Neo4j, GDB)形式存储实体、属性及关系。
- 知识检索与推理:当用户提问时,NLP模块提取的实体和关系会映射到知识图谱上。通过图查询语言或嵌入表示进行检索,并利用图谱中的路径进行多跳推理,回答如“这款手机的电池容量是多少?”及其衍生问题。
- 动态更新:结合实时业务数据和用户反馈,知识图谱需要持续迭代更新,这依赖于高效的数据采集和实体链接算法。
三、 多模态数据采集与处理:语音与图像
为了提供更自然的交互,现代对话机器人正集成语音和视觉能力。
- 语音数据采集与处理:
- 采集:通过麦克风阵列、移动设备等硬件采集原始音频流,涉及降噪、回声消除、声源分离等预处理算法。
- 核心算法:
- 自动语音识别(ASR):采用端到端的深度学习模型(如Conformer、Transformer-based),将语音信号转换为文本,供后续NLP模块处理。
- 语音合成(TTS):将机器生成的回复文本转化为自然流畅的语音,采用神经声码器(如WaveNet, HiFi-GAN)和端到端TTS模型(如Tacotron, FastSpeech)。
- 图像数据采集与处理:
- 采集:通过摄像头、用户上传等方式获取图像数据,涉及图像压缩、标准化等预处理。
- 核心算法:
- 计算机视觉(CV):集成图像识别、目标检测(如YOLO系列)、OCR(光学字符识别)等技术。例如,用户上传商品图片,机器人通过CV识别商品类别,再结合知识图谱查询具体信息。
- 多模态融合:研究视觉-语言预训练模型(如CLIP、ViLBERT),使机器人能同时理解文本和图像信息,处理如“图片里这件衣服有红色款吗?”之类的跨模态查询。
四、 地理数据采集与处理:空间智能的延伸
在本地生活、物流等场景中,地理数据处理能力至关重要。
- 地理数据采集:
- 来源:GPS信号、基站定位、Wi-Fi指纹、用户上报的POI(兴趣点)数据、公开地图数据(如高德、OpenStreetMap)、物联网传感器等。
- 核心算法:多源定位融合算法(如卡尔曼滤波、粒子滤波)以提高定位精度;网络爬虫与解析技术用于获取公开地理信息。
- 地理数据处理与应用:
- 数据清洗与标准化:处理坐标纠偏、地址归一化(将非结构化地址转为标准结构)、POI去重与融合。
- 空间计算:利用地理信息系统(GIS)算法,如地理围栏(Geofencing)、路径规划(A*, Dijkstra算法及其优化)、距离计算、区域热力图分析等。
- 在对话中的应用:当用户询问“附近的 Starbucks”或“配送要多久”时,机器人需调用地理处理模块,结合用户实时位置或指定地址,进行POI检索、路径规划和ETA(预计到达时间)计算,并将结果用自然语言组织回复。
五、 与展望
云小蜜对话机器人背后的技术栈是一个深度融合的体系。NLP负责理解用户意图,知识图谱提供结构化知识支撑,而语音、图像和地理数据的采集与处理算法则不断扩展机器人的感知维度和应用场景。技术的演进将集中在以下几个方面:
- 更强大的预训练与多模态模型:如统一的多模态大语言模型,能更自然地处理图文、语音混合输入。
- 更智能的知识获取与推理:实现知识图谱的动态、自动化构建与复杂逻辑推理。
- 更精准的时空感知与决策:融合实时交通、天气等多源地理时空数据,提供更精准的本地化服务。
- 端云协同与隐私计算:在保证数据隐私和安全的前提下,优化数据采集与处理流程。
这份可能存在的“31页”技术文档或报告,正是对这些核心算法从原理到实践的系统性梳理与,是构建如云小蜜般高效、智能对话机器人的关键技术蓝图。
最新产品

RV10 Pro 地理数据采集与处理 高效精准的智能化解决方案

地理信息科学与生活的距离 远在天边,亦触手可及
利用R语言中的ggmap包进行地理空间数据分析 地理数据采集与处理实践
TI推出新一代电源管理IC,为地理数据采集与处理注入能量采集新动能
智能客服知识图谱 从数据采集到地理信息处理的前沿解析
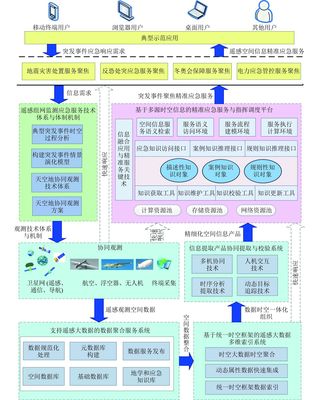
天空地协同遥感监测 构建精准应急服务体系与地理数据采集处理示范
地理信息数据服务 精准采集与智能处理的现代地理数据解决方案

以图为语,沟通世界——海南专精特新企业图语地理的创新之路

捷泰天域携手环保部环评中心,以地理数据技术赋能全国环境影响评价业务

草牧场管理信息系统中地理数据的采集与处理 现代化牧业的关键支撑